{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
BY RESEARCHERS, FOR RESEARCHERS
StereoAim ST4000 Stereotaxic Platform
Unified Precision in Neuroscience
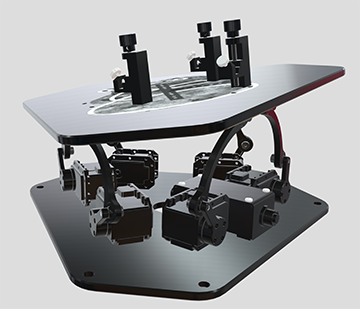
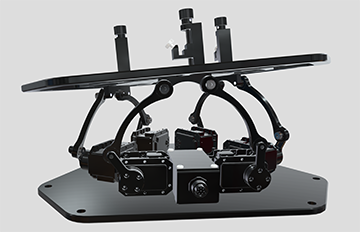
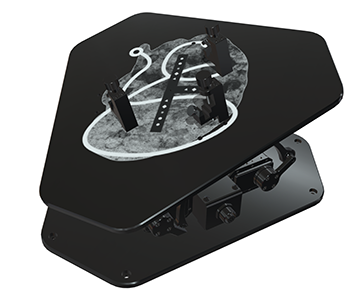
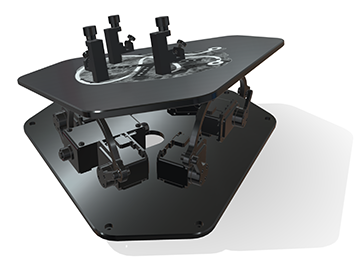
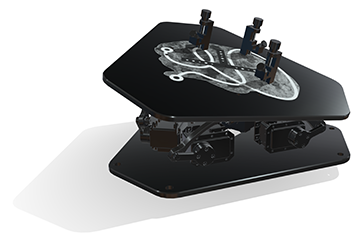
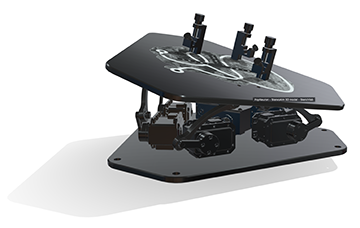
Discover PopNeuron’s StereoAim ST4000, a game-changing semi-automated stereotaxic device designed for small animal research, adept at overcoming traditional limitations in neuroscience. Its hexapod core ensures stable, precise animal positioning that surpasses most other designs. Additionally, the hexapod design put all electronic and mechanical parts under the animal, making the skull the highest point in the entire setup. This creates a lot of room for the surgeon but also allows the user to install heavy and bulky equipment above the animal. Think calcium imaging or multi photon setups. The heated top plate allows for multiple ways to mount the animal – ear bars, bite bars, head posts, your choice. The device also performs automated skull flattening, utilizing a 3D algorithm for accurate landmark analysis. This revolutionary technology dramatically reduces manual adjustments, anesthesia time, and experiment failure rates. To this end, the main software on your PC connects wirelessly with an APP on your phone. You take about 10-20 images of the animal with your phone from several directions. The images are automatically uploaded to the computer and processed to computer the 3D reconstruction of the skull surface, which is the basis of skull flat. Embrace the future of precise, reproducible neurosurgical interventions with PopNeuron’s StereoAim ST4000, where advanced technology meets innovative neuroscience research.

• Companion APP is a free download from Apple or Google store

What We’re Offering
What Makes Us Different
Overcomes Traditional Limitations: Addresses challenges such as mechanical instability or manual errors that often impede precise targeting with neuroscience tools like electrodes or optical fibers.
Innovative Integration of Technology: Features a revolutionary device that combines computer 3D vision and a robotic Stewart platform for automatic, high-precision skull adjustments.
Enhanced Accuracy and Reproducibility: Calculation and execution of skull flat is done on the basis of a high resolution 3D reconstruction of the skull rather than just a few landmarks, resulting in greatly enhanced accuracy and repeatability.
Collaborative and Versatile Platform: Offers an open cloud-based platform for the exchange of atlas systems, catering to a wide range of species, strains, and age groups, and enabling customization and collaboration in the neuroscience community.
Accessories:
Large Baseplate
The Aluminum Baseplate serves as the versatile foundation of the stereotaxic system, featuring a precision-machined breadboard design with a standardized grid of threaded mounting points that enables unlimited configuration possibilities. This robust platform allows surgeons and researchers to position and secure equipment exactly where needed—whether mounting manipulators, sensors, imaging devices, or specialized instrumentation—without being constrained by fixed attachment locations. Constructed from rigid high-grade aluminum, the baseplate provides exceptional stability while maintaining easy sterilization protocols for aseptic surgical environments. The breadboard architecture transforms the stereotaxic workspace into a fully customizable ecosystem, adapting seamlessly to evolving procedural requirements, novel instrument combinations, and individual operator preferences. Designed for StereoAim or Hexatron. 600×375 mm. Hole size: 1/4 -20.
Small Baseplate
The Aluminum Baseplate serves as the versatile foundation of the stereotaxic system, featuring a precision-machined breadboard design with a standardized grid of threaded mounting points that enables unlimited configuration possibilities. This robust platform allows surgeons and researchers to position and secure equipment exactly where needed—whether mounting manipulators, sensors, imaging devices, or specialized instrumentation—without being constrained by fixed attachment locations. Constructed from rigid high-grade aluminum, the baseplate provides exceptional stability while maintaining easy sterilization protocols for aseptic surgical environments. The breadboard architecture transforms the stereotaxic workspace into a fully customizable ecosystem, adapting seamlessly to evolving procedural requirements, novel instrument combinations, and individual operator preferences. For StereoAim or Hexatron product lines; 375×375 mm. Hole size: 1/4 -20.
Dynamic Arm Rest
The Dynamic StereoAim Armrest transforms surgical precision by providing surgeons with a stable, ergonomically-designed support platform that eliminates arm fatigue during delicate procedures. This armrest supports the operator’s forearm in a ball-bearing adjustable cradle, reducing tremor and muscle strain while maintaining the steady hand control essential for millimeter-precise navigation. Crafted from an aluminum, the armrest offers exceptional durability while remaining lightweight. It is fully disinfectable, allowing for thorough cleaning between procedures to maintain aseptic standards. By anchoring the surgeon’s arm in a comfortable, anatomically-neutral position, this accessory enables longer procedures without compromising accuracy. The result? Enhanced surgical precision, reduced operator fatigue, and improved outcomes through consistently stable instrument manipulation throughout even the most intricate stereotactic interventions. The dynamic armrest is adjustable via a ball bearing joint and support the surgeon’s arm in a comfortable u-shaped cradle.
Static Arm Rest
The StereoAim Static Armrest transforms surgical precision by providing surgeons with a stable, ergonomically-designed support platform that eliminates arm fatigue during delicate procedures. This armrest supports the operator’s forearm in optimal positioning, reducing tremor and muscle strain while maintaining the steady hand control essential for millimeter-precise surgery. Crafted from aluminum, the armrest offers exceptional durability while remaining lightweight. It is fully disinfectable, allowing for thorough cleaning between procedures to maintain aseptic standards. By supporting the surgeon’s arm in an anatomically-neutral position, this accessory enables longer procedures without compromising accuracy. The result? Enhanced surgical precision, reduced operator fatigue, and improved outcomes through consistently stable instrument manipulation throughout even the most intricate stereotactic interventions. This static arm rest ends in a unidirectionally neutral and static ball-type structure.
What are Stereotaxic Devices?
Finding and targeting a small brain area reliably and precisely in a live animal or human is not an easy task. The brain is not one uniform organ but rather has many subdivisions that perform different roles. There are brain areas that help us see, hear, or smell, areas that control muscle movement, areas that help us think complex thoughts, and many others. Most of these areas are very small – in a rat or mouse, for example, they can be just fractions of a millimeter. They can also be buried deep inside the brain and under multiple other brain areas which perform entirely different functions. Targeting a particular area of interest with a tool such as an electrode, an injection pipette, or an optical fiber therefore requires a very high level of precision. For some interventions, if the tool is off by only one degree, it will miss the target brain area entirely. Missing the intended target could mean that the tool is now placed in an entirely different brain area which performs an entirely different function than the one that was intended.
Stereotaxic devices are tools that aid in the accurate targeting of brain areas. The most commonly used procedure by stereotaxic devices makes use of established correlations between landmarks on the outer skull (such as bone sutures) and the location of brain areas inside the skull. The two most used landmarks on top of the skull are called Bregma and Lambda. When performing a typical neurosurgical procedure, an investigator uses a stereotaxic apparatus that holds the animal’s head securely in place. Bregma and Lambda are surgically exposed and brought into the same horizontal plane to accomplish “skull-flat”. In many cases, this also includes the leveling of the skull medio-laterally axis. Practically, skull-flat is accomplished by measuring the z-coordinates of Bregma and Lambda (often manually), followed by (manual) adjustments with a manipulator. Multiple iterations of measuring and adjusting are needed for an acceptable level of precision. The target brain area is then described relative to skull-flat, for example, “rotate by x degrees, drill there, and advance the tool by xx micrometers”.
Challenges with Traditional Stereotaxic Devices
Challenges with this traditional approach include that these manual adjustments take a significant amount of time, which is costly in terms of the animal’s time under anesthesia, which in turn affects the mortality of the procedure. Also, many devices operate purely mechanically and require the manual movement of manipulators, introducing jitter, friction, and inertia, and thus, a perfect skull-flat position is very difficult to accomplish. Next, after skull-flat is accomplished, the coordinates of the target brain area need to be known, thus there needs to be a history of targeting that exact brain area in that species/age group/strain. If none exists, which is the case for the majority of species and age groups, coordinates need to be determined via pilot studies. Finally, even if atlas systems and coordinates are available, methods to translate a given location from the virtual coordinate system of the atlas into the corresponding coordinate in the live brain are rudimentary. While this lack of sophisticated technology may be acceptable for some stereotactically simple types of interventions (for example, targeting large cortical areas with a dorsal approach), it is not acceptable for many other experiments that target small and deep brain areas which can have a significant failure rate. Even in cases where a lab has the expertise to target the desired brain area with a relatively high success rate (for example, because they employ a very skilled lab member), this is problematic since the success depends on that person and their “magic touch” – effectively reducing the reproducibility of these experiments for all other labs that don’t have access to that person. Even the same lab may have trouble reproducing their own experiments once that person leaves.
How Can PopNeuron’s StereoAim ST4000 Help Overcome These Challenges?
PopNeuron’s ST4000 stereotaxic device is a high-end and semi-automated device for small animal use which addresses many of the weaknesses with competitor’s devices and solves many of the challenges described above. The device is based on a hexapod (Stewart platform) at its core. The hexapod is compatible with multiple attachments to securely position the animal’s skull (ear bars, bite bars, head posts) and has an integrated heat pad. The six axes allow for stable and precise positioning of the animal and automated skull flat. A 3D reconstruction algorithm analyzes the skull and skull position with hundreds of landmarks and calculates the position of the reconstructed skull relative to skull flat – and subsequently executes movements of the hexapod to move the animal into skull flat position. Thus, skull flat is accomplished automatically within just a few seconds and is based on the analysis of not one or two landmarks, but hundreds of points.
Example Setup:
StereoAim 4000 with large base plate and two static arm rests
Technical Specifications
| Color | Anodized Black |
|---|---|
| Dimensions | W16 x L16 x H28 cm |
| Travel Range In X | ±15mm |
| Travel Range In Y | ±15mm |
| Travel Range In Z | ±15mm |
| Rotation Range In Pitch | ±15° |
| Rotation Range In Yaw | ±15° |
| Rotation Range In Roll | ±15° |
| Maximum Velocity In X | 10mm/s |
| Maximum Velocity In Y | 10mm/s |
| Maximum Velocity In Z | 10mm/s |
| Maximum Angular Velocity In Pictch | 10°/s |
| Maximum Angular Velocity In Yaw | 10°/s |
| Maximum Angular Velocity In Roll | 10°/s |
| Unidirectional Repeatability In X | 0.25mm |
| Unidirectional Repeatability In Y | 0.25mm |
| Unidirectional Repeatability In Z | 0.25mm |
| Unidirectional Repeatability In Pitch | 0.25° |
| Unidirectional Repeatability In Yaw | 0.25° |
| Unidirectional Repeatability In Roll | 0.25° |
| Maximum Load Capacity, | 8lb (3.62kg) |
| Material | Anodized Aluminum |
| Operating Temperature Range | 10C to 50C |
Documentation and Software
Downloads
Publications & Patents
Publication:
Robotic stereotaxic system based on 3D skull reconstruction to improve surgical accuracy and speed
Ly PT, Lucas A, Pun SH, Dondzillo A, Liu C, Klug A, Lei TC. Robotic stereotaxic system based on 3D skull reconstruction to improve surgical accuracy and speed. J Neurosci Methods. 2021 Jan 1;347:108955. doi:
10.1016/j.jneumeth.2020.108955. Epub 2020 Sep 21. PMID: 32971134; PMCID: PMC8764742.
Terms and Conditions
Terms and Conditions
Please read these Terms and Conditions (“Terms”, “Terms and Conditions”) carefully before using the website and purchasing any products from PopNeuron LLC (“us”, “we”, or “our”).
- Agreement to Terms
By accessing or using our website and purchasing any products from us, you agree to be bound by these Terms. If you disagree with any part of the terms, then you may not access the website or initiate a purchase.
- Products
- Our products are intended for use in accordance with applicable regulations and guidelines. It is your responsibility to ensure that the products purchased are suitable for your intended use.
- We strive to accurately represent our products, including descriptions, images, and specifications, but we do not guarantee that such information is complete, current, or error-free.
- Orders and Payment
- By placing an order through our website, you warrant that you are legally capable of entering into binding contracts and that all information you provide is accurate and complete.
- Prices for our products are subject to change without notice. We reserve the right to modify or discontinue any product at any time without prior notice.
- Payment must be made in full at the time of purchase. We accept various forms of payment as indicated on our website.
- Shipping and Delivery
- We aim to ship orders promptly; however, delivery times may vary depending on factors beyond our control. We are not liable for any delays in delivery.
- Risk of loss and title for products purchased from us pass to you upon delivery of the items to the carrier.
- Returns and Refunds
- Please refer to our Warranty and Return Policy [link] for information on returns and refunds.
- Warranty
- Our products may be subject to warranties provided by the manufacturer. Please refer to the specific product documentation for warranty details, as well as our Warranty and Return Policy [link].
- Limitation of Liability
- In no event shall PopNeuron LLC, nor its directors, employees, partners, agents, suppliers, or affiliates, be liable for any indirect, incidental, special, consequential, or punitive damages, including without limitation, loss of profits, data, use, goodwill, or other intangible losses, resulting from (i) your access to or use of or inability to access or use the website; (ii) any conduct or content of any third party on the website; (iii) any content obtained from the website; and (iv) unauthorized access, use, or alteration of your transmissions or content, whether based on warranty, contract, tort (including negligence), or any other legal theory, whether or not we have been informed of the possibility of such damage, and even if a remedy set forth herein is found to have failed of its essential purpose.
- Governing Law
- These Terms shall be governed and construed in accordance with the laws of Colorado, without regard to its conflict of law provisions.
- Changes to Terms
- We reserve the right, at our sole discretion, to modify or replace these Terms at any time. If a revision is material, we will try to provide at least 30 days’ notice prior to any new terms taking effect. What constitutes a material change will be determined at our sole discretion.
- Contact Us
- If you have any questions about these Terms, please contact us at frontdesk@popneuron.com.
By using our website and purchasing our products, you acknowledge that you have read, understood, and agree to be bound by these Terms and Conditions.
Brain Atlas Library
Connect to the BRAIN ATLAS LIBRARY
Quick Links
User Support
Contact
Ready to Work Together?